短讯!CAN总线错误处理看这里就对了!
2023-06-24 02:56:55 来源: 面包芯语
CAN协议具有检测错误的能力。但是如果发生错误,它无法纠正错误。因此,如果发生错误,检测到的节点或ECU将向CAN网络发送错误帧。与之相对应的CAN 2.0 总线协议定义参与通信的CAN节点错误类型如下:
 (资料图片)
(资料图片)
如果在使用位填充编码的位流中,出现了第六个连续相同的位电平,将检测到一个位填充错误;
当一个固定形式的位场含有一个或多个非法位时,将检测到一个形式错误;
在应答间隙(ACK SLOT)所监视的位不为“显性”,则会检测到一个应答错误;
如果接收器的CRC结果和发送器的CRC结果不同,将检测到一个CRC错误。
2 CAN总线错误处理机制
每个CAN控制器都有自己的CAN总线错误处理程序。为了处理这个问题,每个CAN控制器有两个计数器寄存器(0 – 255),即:发送错误计数器 (TEC) 和接收错误计数器 (REC) 。如果5个错误中发生任何一个发生错误,它将根据错误类型增加 TEC 或 REC。Tips:一个特例:如果CAN总线上只有一个节点,该节点发送数据帧后得不到响应(ACK),其发送计数器TEC最大只能计到128,即该节点只能进入错误被动状态,而不会进入总线关闭状态,这就是为什么当您没有将任何设备连接到网络时,您的ECU将持续发送帧,但不会检测到总线关闭并保持错误被动状态。
错误计数器的递增和递减操作是不对称的。在成功传输或接收消息时,如果相应的错误计数器未为零,则相应的错误计数器将递减。在传输或接收错误的情况下,计数器将递增,但递增值大于递减值。具体错误限制管理规则如下:
a) 当接收器检测到错误时,接收错误计数器REC+ 1。例外:发送活动错误标志、过载标志期间的位错误。
b) 当接收器在发送错误标志后检测到显性位作为第一位时,接收错误计数器REC+8。
c) 当发送器发送错误标志时,发送错误计数器REC+8。
1) 例外 1:如果发送器是错误被动状态,并且由于未检测到显性 ACK 而检测到 ACK 错误,并且在发送其被动错误标志时未检测到显性位。 2) 例外 2:如果发送方因为仲裁期间发生填充错误而发送错误标志,因此,填充位应该是隐性的,并且已作为隐性发送但被监视为主导的。 在这两种例外情况下,传输错误计数器保持不变。d) 如果发送器在发送活动错误标志或过载标志时检测到位错误,则发送错误计数器TEC+8。
e) 如果接收器在发送活动错误标志或过载标志时检测到位错误,则接收错误计数器TEC+8。
f) 在发送活动错误标志、被动错误标志或过载标志后,任何节点都应容忍最多7 个连续显性位。在检测到第14个连续显性位后(在活动错误标志或过载标志的情况下)或在被动错误标志后检测到第 8 个连续显性位之后,并且每当在出现额外的8个连续显性位序列之后,REC和TEC都需要+8。
g) 成功传输一个帧后(收到 ACK 并且没有检测到错误,直到 EOF 被检测到完成),传输错误计数器应减1,直到为0。
h) 成功接收一个帧后(接收到 ACK 时隙没有错误并且成功ACK 位的发送),接收错误计数器应减 1,如果它介于1和127。如果接收错误计数器为0,则应保持为零 (0),如果它大于127,则应将其设置为介于119和127。
3 什么是CAN协议中的故障限制
故障限制是一种检查机制,可以区分短时干扰(例如电缆的噪声耦合到传输介质)和永久性故障(例如,节点发生故障并干扰总线). CAN通信节点的状态分为暂时错误(Error active和Error Passive)和永久性故障(Bus Off);
因此,节点可能处于以下三种可能的错误状态之一:
错误活动状态。错误被动状态。错误总线关闭状态。
1. CAN协议中的错误主动状态
当CAN设备通电时,它以错误活动状态启动。处于错误活动状态的设备通常可以参与CAN通信。它还会在检测到错误时传输主动错误标志。此主动错误标志(表示主导 0 位序列)会导致当前帧传输中止,从而导致同一消息的后续重新传输。
其中两个错误计数器(TEC 和 REC)在错误活动状态下都小于 128。它完全参与总线通信,并通过传输活动错误帧来发出错误信号。这包括 6 个主导位的序列,后跟 8 个隐性位,所有其他节点都使用适当的错误标志进行响应,以响应违反位填充规则。
2. CAN协议中的错误被动状态
如果发送错误计数器或接收错误计数器大于127,CAN设备将进入错误被动状态。处于错误被动状态的设备仍然可以参与通信,但在检测到任何错误时会传输被动错误标志。此被动错误标志(隐性 1 位序列)通常不会中止其他设备(如错误主动帧)传输的帧。
此外,错误被动节点必须在消息传输后等待额外的时间(Suspend Transmission Field,ITM后的 8 个隐性位),然后才能启动新数据。
3. CAN协议中的总线关闭状态
如果CAN控制器的发送误差计数器超过255,则进入总线关闭状态。它与总线断开连接(使用内部逻辑),不再参与总线活动。简单地说,我们可以说物理上与总线连接和逻辑上断开连接。为了重新连接协议控制器,必须执行Bus Off recovery sequence。这通常涉及主机系统对CAN控制器的重新初始化和配置,之后它将等待(128 * 11)隐性位时间,然后再开始通信。
关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯





热点推荐
-

工龄与退休后工资领取对照表 工龄30年能领多少退休金?
-

嘉凯城(000918.SZ)今日起临时停牌 复牌时间未知
-

中科沃土转型升级混合 6月回撤已超12%
-
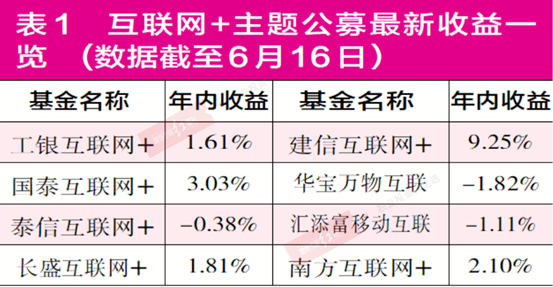
“互联网+”产品普遍举步维艰 多家产品被“深套”
-
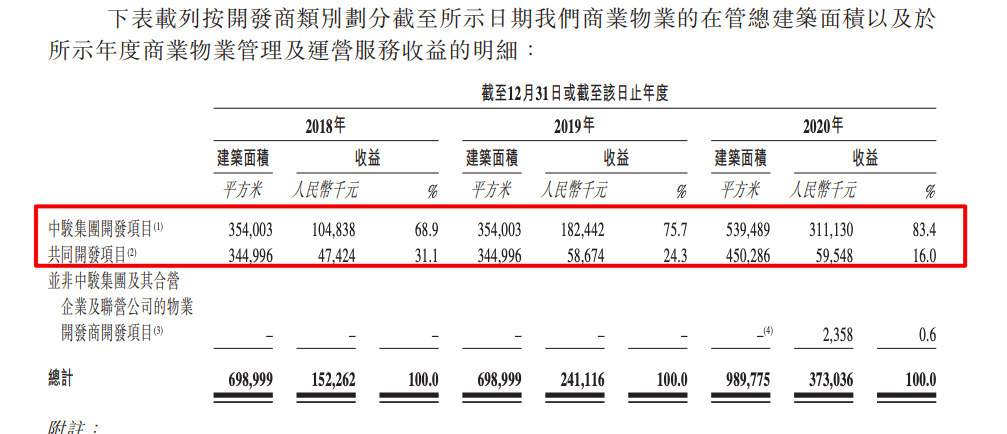
中骏商管将挂牌 中骏控股集团持股62.43%
-
短讯!CAN总线错误处理看这里就对了!
-

端午节假期,来洛阳美术馆参观书画展吧
-

天天关注:【践行社会主义核心价值观】滨北第一幼儿园开展“寻味端午 浸润童心”主题教育活动
-

妃鱼二手奢侈品 发现璀璨 展现非凡
-

世界滚动:量子算力与医疗数据首次“握手”
-

赏国粹 品非遗 北京西城端午节尽显文化范儿_头条
-

陶德爆料:马岛之魂或登PC-全球播报
-

一男子在南部溺水身亡,凌晨打捞上岸|焦点讯息
-

iPhone 15 新增 7nm 芯片,大幅提升生态体验_全球热推荐
-

柳林县2023年度事业单位招才引智笔试成绩查询及资格复审公告 当前热点
-

环球观天下!如何在离婚送女人礼物的同时,穿上时髦的70年代迪斯科装扮?15至25个汉字
-

胡萝卜南瓜小米粥的功效与作用_南瓜小米粥的功效与作用
-

俄罗斯称美国正扩充驻叙利亚兵力
-

天天观热点:点亮夜经济!来西湖这场啤酒音乐节感受夜市氛围
-

市场管理员踹翻商户小龙虾被打出血 基本信息讲解 当前最新
-

消费助农促振兴 保亭这场电商直播比赛不容错过 今日热讯
-

适合人工养殖的名贵淡水鱼种|天天热闻
-

这款平价肌底液真的能让你拥有少女肌吗?
-

前沿资讯!梁平区长陈孟文调研防汛抗旱和地质灾害防治工作
-
最资讯丨合锻智能: 如果造船企业扩大产能,公司在此类订单方面也会受益
-

烟台高新区第二实验幼儿园开展夏至系列活动_头条焦点
-
2023年高考成绩查询方式公布
-

【世界速看料】周迅被曝新恋情后大方秀恩爱,她和陈坤20年的感情又算什么?
-

天天视讯!美对乌军事支持估值“虚高”62亿美元
-

迷药网络灰色销售链调查 商家宣称网上下单“听话水”送货上门|世界通讯